Le grandi colture, la viticoltura e, almeno in parte, la frutticoltura e l’orticoltura da industria, hanno ampiamente beneficiato delle innovazioni tecnologiche introdotte nei processi produttivi grazie alla meccanizzazione. Al contrario, la filiera frutticola per il mercato fresco rimane ancora altamente dipendente dal lavoro manuale, in particolare per le operazioni di potatura e di raccolta.
“I coltivatori di ciliegie devono poter disporre di soluzioni tecniche sperimentate e validate dalla ricerca, efficaci e convenienti alfine di incrementare l'efficienza degli impianti, mantenere alta la qualità del prodotto secondo le richieste dei mercati e, soprattutto, ridurre i costi di produzione. Tra queste, la possibilità di meccanizzare alcune operazioni colturali, come la potatura e la raccolta”. Il Prof. Matthew Whiting della WSU l'aveva preannunciato in apertura della relazione magistrale tenuta lo scorso anno al ICS di Macfrut (Whiting, 2022): “il futuro passa da qui”.
Il calo della disponibilità di manodopera qualificata e l’aumento dei costi delle materie prime e del lavoro stanno mettendo a serio rischio la sostenibilità economica dell’intera filiera. È proprio sul bilancio economico dell'impresa che si gioca il futuro della cerasicoltura specializzata.
Conti alla mano, produrre ciliegie in impianti moderni e coperti costa in media da 3,20 a 3,55 euro/kg, secondo la tipologia adottata. Il 60-70% dei costi di produzione sono da imputare alle spese di raccolta e potatura (Ghelfi e Palmieri, 2022).
Sviluppo di sistemi di allevamento planari
Alle Washington State University e Oregon State University un team multidisciplinare di agronomi e ingegneri ha studiato diverse metodologie per migliorare l’efficienza della produzione, con particolare attenzione alla potatura e alla raccolta. L’obiettivo a lungo termine è quello di migliorare l’efficienza e la redditività della produzione, mantenendo inalterata, o migliorandola, la qualità dei frutti.
“Per raggiungere tale obiettivo” prosegue Whithing” “il nostro gruppo ha perfezionato le forme d’allevamento del ciliegio con strutture bidimensionali, pareti fruttifere compatte basate sul modello dell’UFO - Upright Fruiting Offshoots. Inoltre, sono state sviluppate e studiate soluzioni ingegneristiche per la potatura, l’impollinazione, e il diradamento meccanico, oltre a sistemi di raccolta sia completamente meccanici sia meccanicamente assistiti.
È chiaro che le forme d’allevamento dovranno adattarsi alle tecnologie di automazione e meccanizzazione attuali e future e, allo stesso modo, la ricerca di tali tecnologie non può avvenire senza considerare l’opinione di chi opera nel settore, sia da un punto di vista operativo sia di ricerca”.
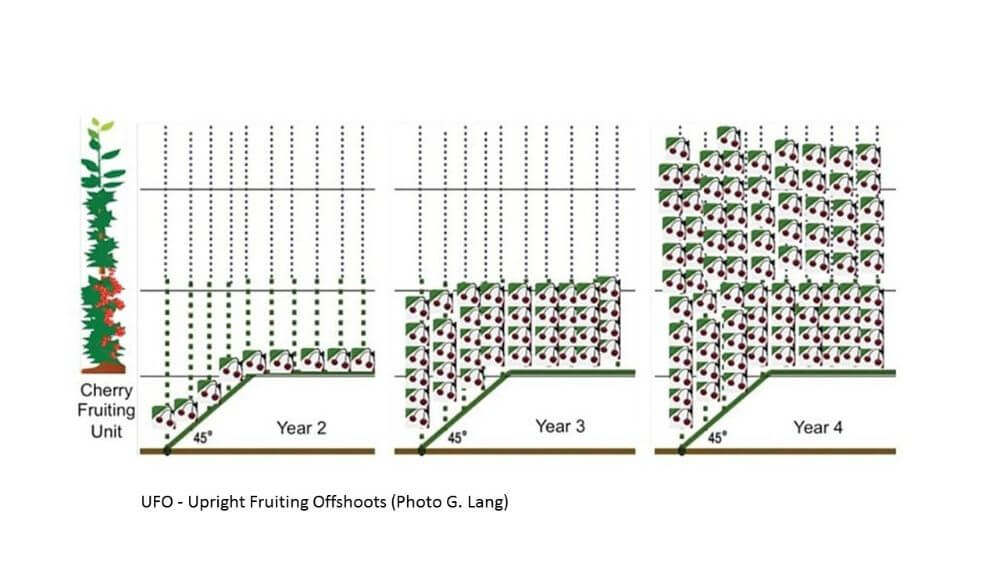

La graduale evoluzione delle forme d’allevamento, da grandi strutture tridimensionali a strutture planari rigorosamente e geometricamente allevate in pareti strette con cordoni verticali rinnovabili, insieme all’adozione delle tecniche di precisione nella gestione della chioma, offrono dunque l’opportunità di adottare la meccanizzazione e di ridurre, di conseguenza, i costi di potatura.
Uno degli obiettivi chiave iniziali che i ricercatori americani si erano posti nello sviluppo di nuove forme di allevamento a 2D era proprio quello di semplificare al massimo gli interventi necessari per la potatura di produzione.
La potatura meccanica selettiva
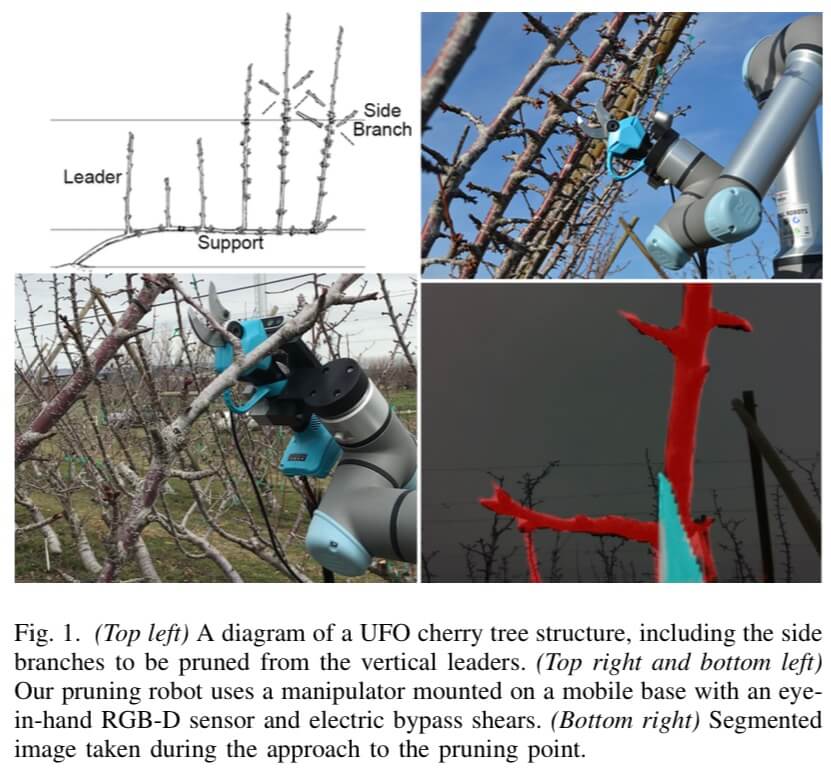
Il progetto di ricerca in corso presso le due Università americane mira a sviluppare un sistema di potatura autonomo che si possa adattare a sistemi di allevamento con regole di potatura relativamente semplici, come appunto l’Upright Fruiting Offshoot.
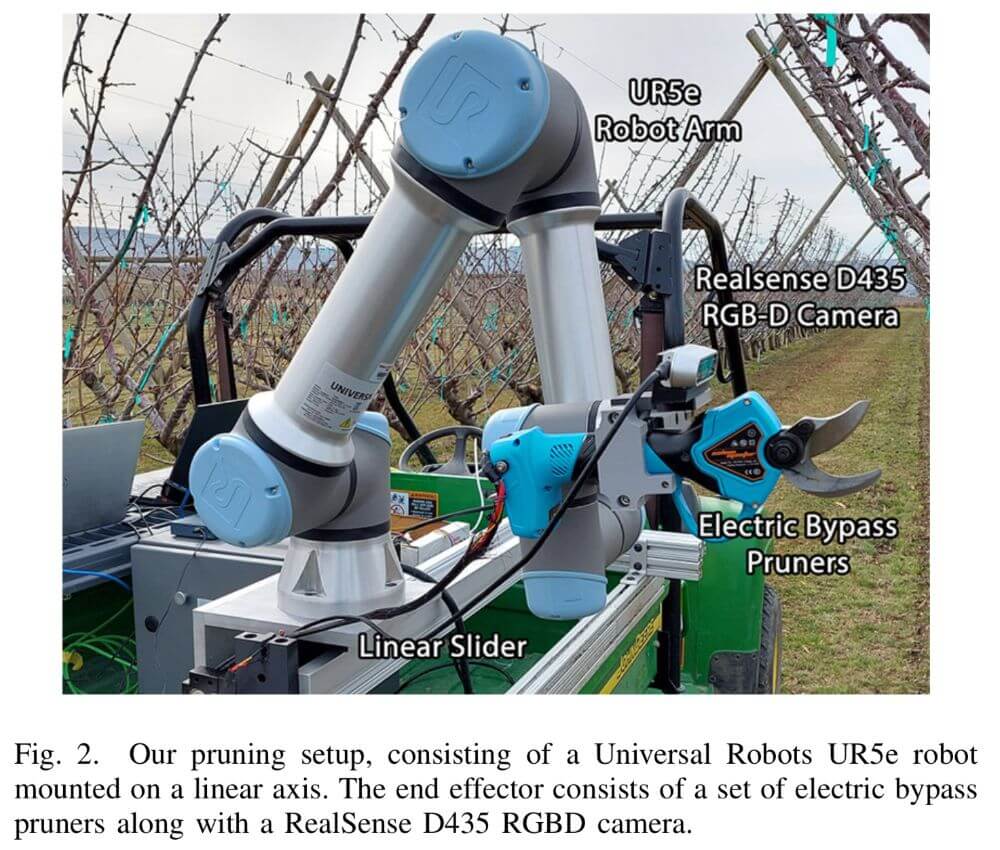
Il sistema integrato include un robot a sette gradi di libertà con un effettore finale di potatura "eye-in-hand". Il robot utilizza un feedback visivo online e un controller addestrato interamente alla simulazione per guidare con precisione il dispositivo di taglio al punto di potatura mirato. Il sistema è capace di operare in completa autonomia e richiede il minimo controllo dell'ambiente.
Le prestazioni del robot sono state convalidate attraverso prove sul campo in un ceraseto raggiungendo una percentuale di successo di taglio del 58%. Anche se non completamente robusto e richiedendo miglioramenti nella produttività, questo sistema automatizzato è il primo ad operare su alberi da frutto e rappresenta un'utile piattaforma di base per il prossimo futuro (You et al, 2022).
Bibliografia
R. Ghelfi, A. Palmieri (2022). Planting a new cherry orchard system: evaluation of economic efficiency. ITALUS HORTUS
A. You, N. Parayil, J.G. Krishna, U. Bhattarai, R. Sapkota, D. Ahmed, M.Whiting, M. Karkee, C.M. Grimm, J.R. Davidson (2022). An autonomous robot for pruning modern, planar fruit trees. JOURNAL OF ROBOTICS AND AUTOMATION LETTERS
M. Whiting (2022). Optimizing sweet cherry production efficiencies with mechanization. ITALUS HORTUS
Cherry Times - Tutti i diritti riservati